C.U.A.K.

C.U.A.K. holds a special place in SmartMove Lab’s history as our very first autonomous surface vessel. This student-designed ASV went on to win the 1st Aegean RoBoat Race in 2023, but its real significance lies in the months of learning, problem-solving, and hands-on engineering that brought it to life.
See C.U.A.K. in action: visit our 1st Aegean RoBoat Race coverage for videos of the competition, photos from race day, and details on all the competing vessels.
From Empty Hull to Autonomous Vessel
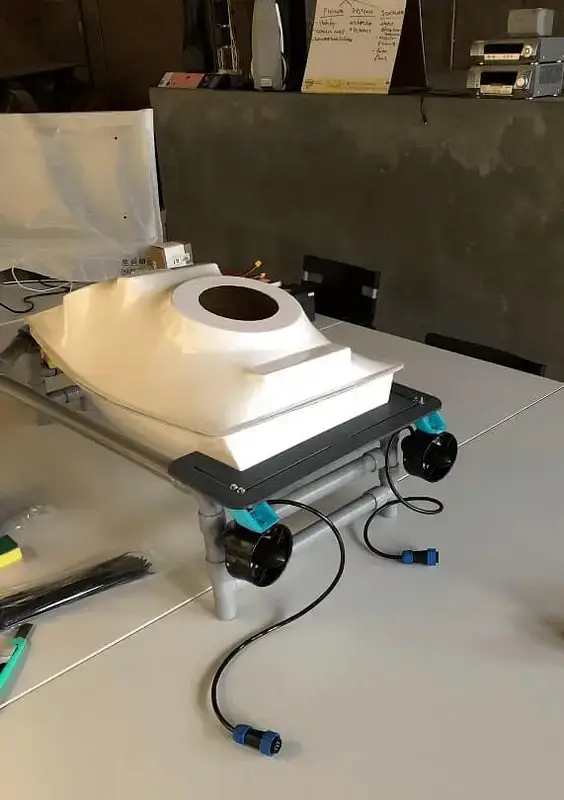
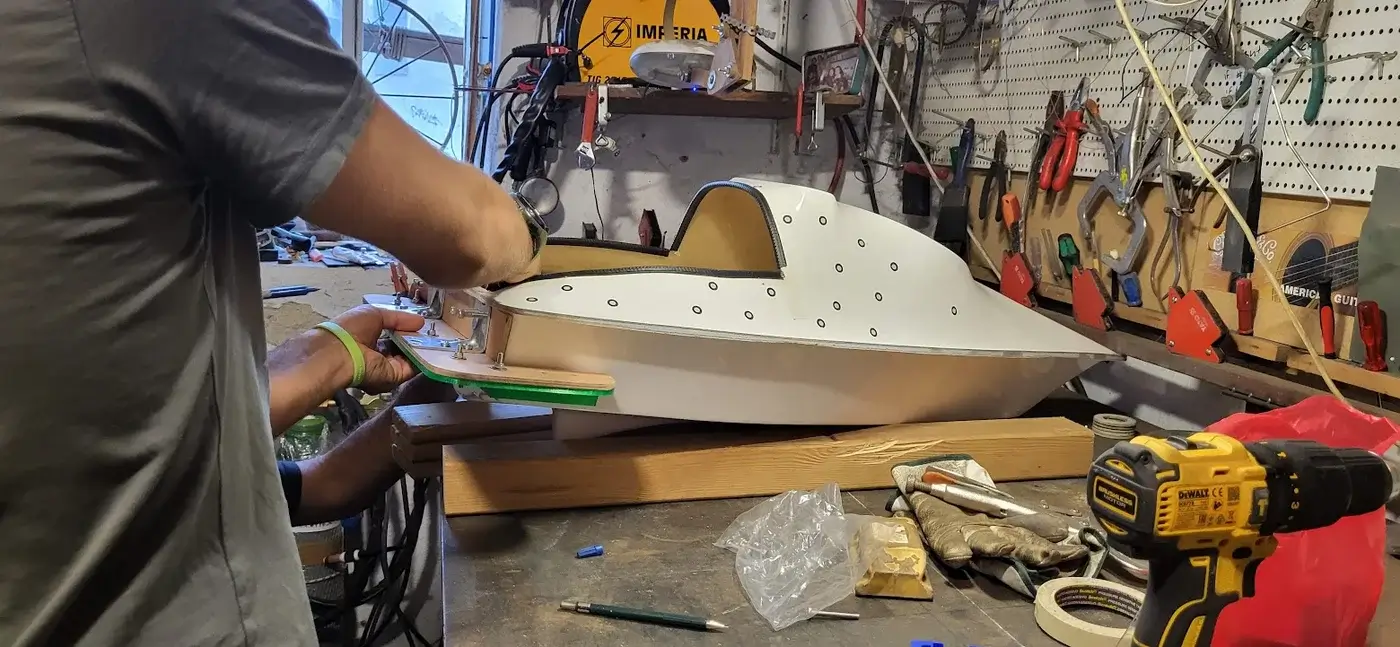
The journey began with nothing more than an empty polyethylene plastic hull. Transforming it into a fully autonomous vessel demanded significant modifications: cutting, reshaping, and designing custom solutions to safely house all electronics, batteries, and thrusters. Every component placement had to balance waterproofing, weight distribution, and accessibility for maintenance.
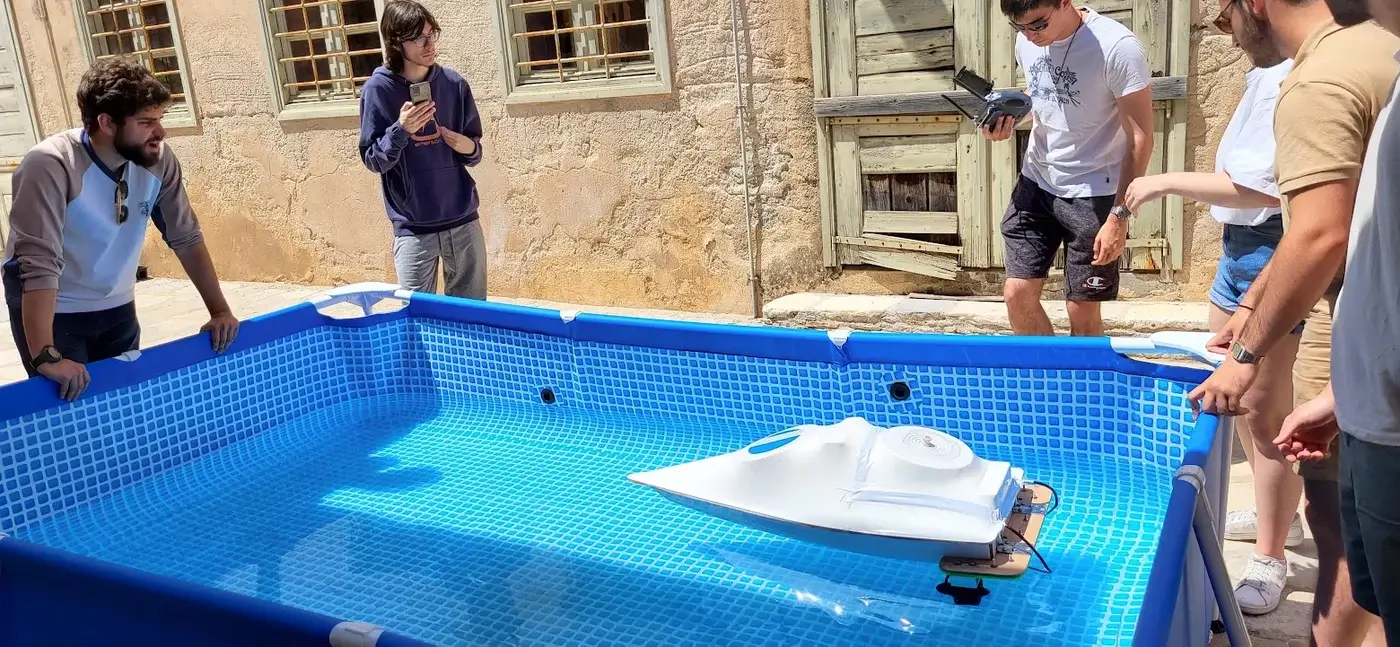
Students worked through countless iterations, from initial CAD designs to fabrication of 3D-printed sensor mounts (ABS/PLA) that integrated commercial electronics into purpose-built housings. The development cycle included controlled pool tests to validate basic systems, followed by increasingly demanding sea trials in the waters around Syros. Not everything went smoothly—water ingress into the electronics compartment forced the team back to the workshop more than once, leading to redesigned seals, improved cable glands, and hard-won lessons in marine engineering.
Autopilot & Electronics
At the heart of C.U.A.K. is the CUAV V5+ Flight Controller, providing robust GPS waypoint navigation and autonomous control. Students configured the autopilot from scratch, learning the intricacies of PID tuning, sensor calibration, and failsafe programming.
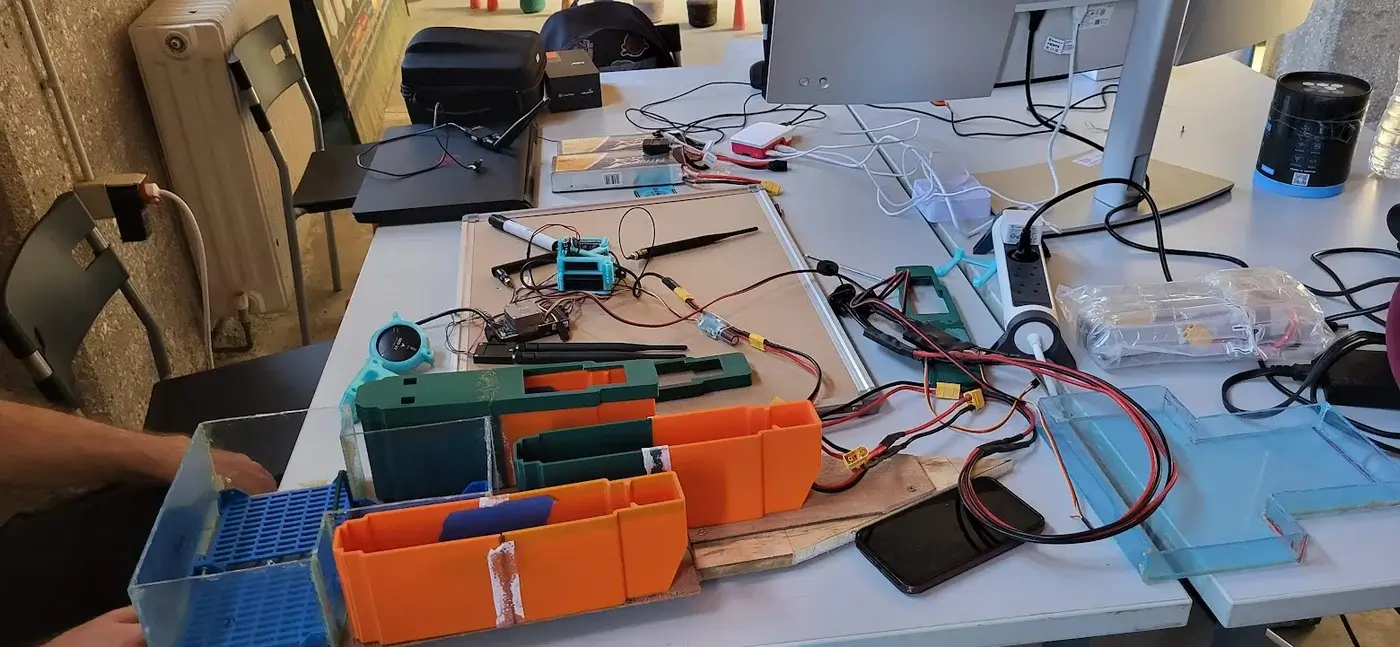
The electronics stack also includes:
- Raspberry Pi 4 as onboard companion computer
- Rugged GPS/INS for reliable positioning
- Basic LiDAR integration (student-developed code)
- 180° field-of-view camera with custom vision processing
- Encrypted wireless network for secure communications
Island Craftsmanship
Being located on Syros gave us access to a community of skilled craftsmen who have worked with the sea for generations. Yorgos “Yajam” Roussos, a local expert technician, helped us design and build the wooden thruster mounting system using traditional marine-grade wood, ensuring durability in harsh sea conditions. This collaboration between academic research and local maritime expertise exemplifies the unique advantages of our island location.
Testing & Validation
The path to the RoBoat Race involved extensive testing: first in controlled pool environments to validate basic navigation and motor control, then progressively more challenging sea trials in the waters around Syros. Each test revealed new challenges, from wave interference with GPS signals to waterproofing failures that sent students back to the workshop.
Student Achievement
C.U.A.K. represents months of dedicated work by multiple student teams, each contributing to different aspects: electronics integration, autopilot configuration, software development, and physical construction. The project embodies our lab’s philosophy that the best learning happens when students build real systems that must perform in real-world conditions.
Winning the 1st Aegean RoBoat Race validated not just the vessel’s capabilities, but the entire educational approach that produced it.
Specifications
| Length | ~1m |
| Beam | 0.45m |
| Height | 0.5m |
| Weight | ~7kg |
| Max speed | 7 knots |
| Survey speed | ~3.5 knots |
| Payload capacity | 3-4kg |
| Endurance | ~6 hours at 3.5kn |
| Battery | 3×9000mAh |
| Propulsion | 2× Blue Robotics T200 (100N total) |
Deployment Gallery