We operate data collection infrastructure and develop open-source software tools for maritime intelligence. We gather real-time tracking data from our AegeaNET sensor network and operational data from sea trials with our autonomous surface vessels, ROVs, and swarm fleet. Our analytical tools transform this data into actionable insights for traffic analysis, route optimization, and autonomous systems research.
Maritime Data Analytics Toolbox
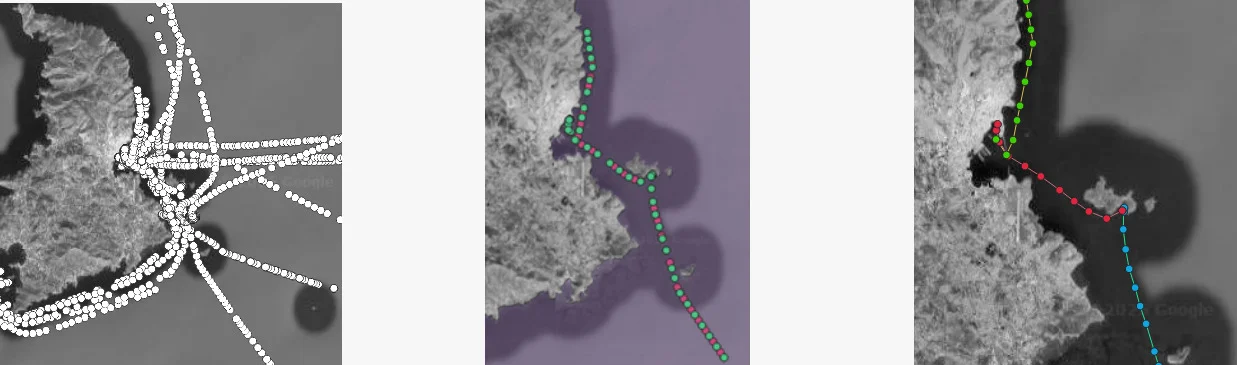
Transform raw AIS data into actionable maritime intelligence. Our open-source Python toolkit processes vessel trajectories to reveal traffic patterns, identify maritime routes, and support decision-making for port operations and maritime safety.
Key Capabilities:
- Smart filtering of erroneous AIS messages
- Trip extraction
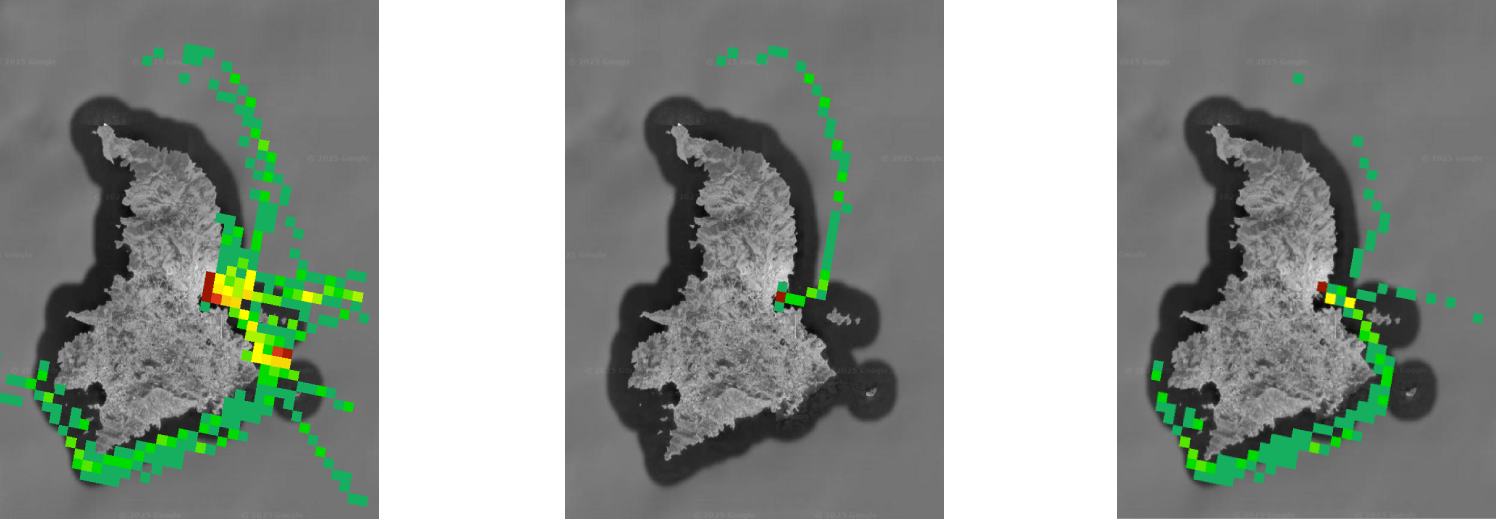
- Traffic density heatmaps
- Trajectory smoothing via Kalman filtering
Dataset preparation
The toolbox provides a flexible pipeline to transform raw vessel trajectory data (AIS) into analysis ready datasets. Users can easily configure the filters and selection criteria, including noise filtering, downsampling and trip extraction to form datasets for the area and period of interest.
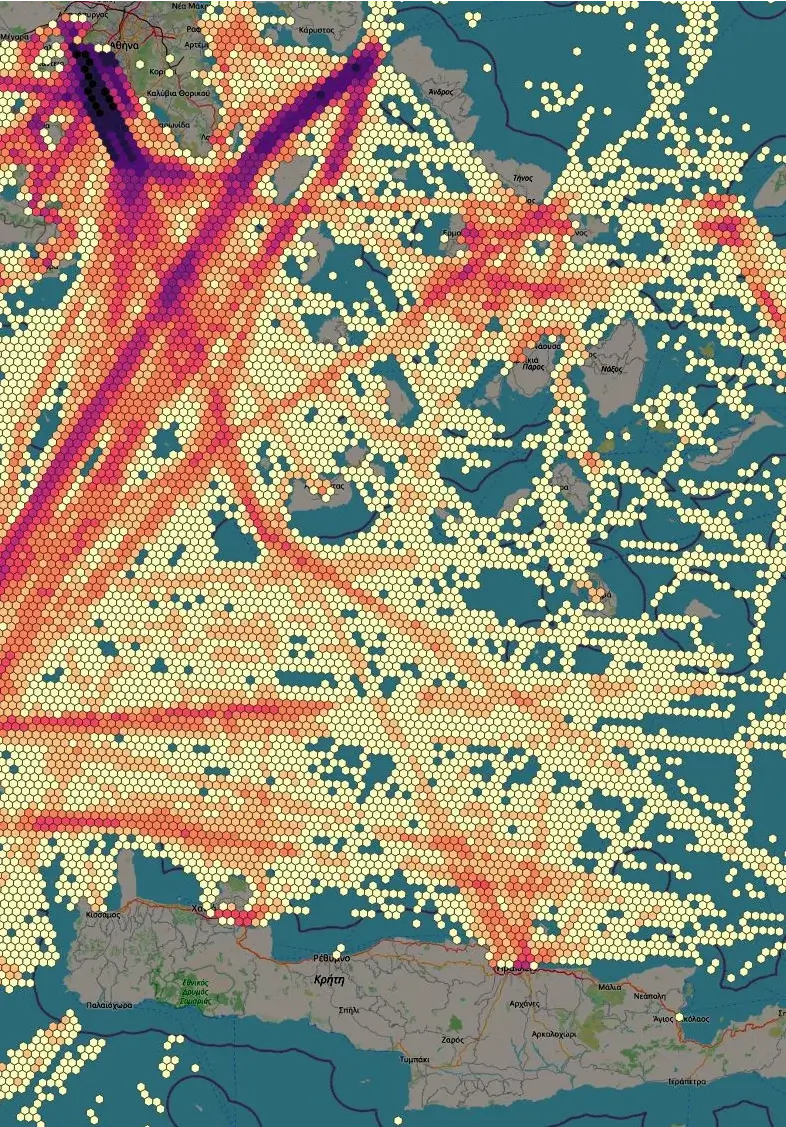
Effective traffic visualizations
Easily generate effective heatmaps that precisely depict vessel traffic within the area of interest. The toolbox allows for the creation of density maps (TIFF images) based on the selected resolution and vessel types. Additionally, a series of density metrics are provided, representing the number of passing vessels, the different trips, the total time travelling in an area and others.
AegeaNET: An Advanced Open Sensor Network
AegeaNET is our real-time maritime and aviation tracking network deployed across the Aegean Sea. The system integrates Automatic Identification System (AIS) receivers for vessel tracking with Automatic Dependent Surveillance-Broadcast (ADS-B) receivers for aircraft monitoring, creating a comprehensive situational awareness platform.
Network Coverage
Our network spans critical maritime corridors throughout the Aegean Sea, covering major shipping lanes, ferry routes, and island connections. With stations strategically positioned across the region, AegeaNET provides continuous monitoring of vessel and aircraft movements in the Aegean Sea area.
What sets AegeaNET apart is our commitment to open science and collaboration. We are actively sharing data with research institutions, maritime authorities, and academic partners worldwide. The raw tracking data feeds into our on-premises computing infrastructure, where it is processed, archived, and made available for research purposes.
The network's data streams are integrated with our distributed computing cluster, enabling real-time analytics, trajectory prediction, and maritime traffic pattern analysis. This infrastructure supports both our own research initiatives and collaborative projects with partner institutions.
Key Benefits of an Open Academic Sensor Network
- Real-Time Data Access: Immediate availability of vessel and aircraft tracking data for research and development
- Ground Truth for Validation: Validate simulation models, prediction algorithms, and autonomous navigation systems
- Historical Archives: Years of archived data for trend analysis, seasonal pattern studies, and long-term research
- Multi-Modal Integration: Combined maritime (AIS) and aviation (ADS-B) data for comprehensive situational awareness
- Open Science: Data sharing with research community promotes collaboration and accelerates innovation
- Educational Resource: Live data feeds for student projects, dissertations, and teaching maritime informatics
- Benchmarking Platform: Common dataset for comparing machine learning models and prediction algorithms
- Anomaly Detection: Real-world data for developing and testing maritime security applications
- Environmental Monitoring: Traffic pattern analysis for studying environmental impacts and sustainability
- Policy Research: Evidence-based data for maritime traffic management and regulatory studies
Research Areas Supported by an Open Academic Tracking Network
- Maritime Traffic Analysis: Studying vessel movement patterns, port operations, and shipping route optimization
- Autonomous Navigation: Developing collision avoidance systems and path planning algorithms for autonomous vessels
- Predictive Analytics: Building models for arrival time prediction, route forecasting, and traffic flow estimation
- Machine Learning: Training neural networks for vessel trajectory prediction, behavior classification, and anomaly detection
- Digital Twins: Creating virtual representations of maritime environments for simulation and testing
- Safety and Security: Detecting unusual behavior, monitoring restricted areas, and supporting search and rescue operations
- Environmental Impact: Analyzing emission patterns, fuel consumption, and environmental footprint of maritime traffic
- Supply Chain Optimization: Improving logistics, port efficiency, and just-in-time delivery systems
- Multi-Agent Systems: Researching cooperative behavior and coordination among multiple autonomous vehicles
- Sensor Fusion: Combining AIS/ADS-B data with radar, satellite imagery, and other sensor modalities
Simulation & Autonomous Control
Swarm Intelligence & SITL Simulation
Using advanced software-in-the-loop (SITL) simulation environments, we develop and evaluate complex patrolling and area exploration scenarios for autonomous unmanned surface vehicles (USVs). Our simulation framework enables algorithmic mission planning where patrol areas are automatically divided into subregions based on the number of available USVs. Each vehicle is autonomously assigned its exploration mission within its designated zone, demonstrating coordinated swarm behavior for maritime surveillance and reconnaissance operations.